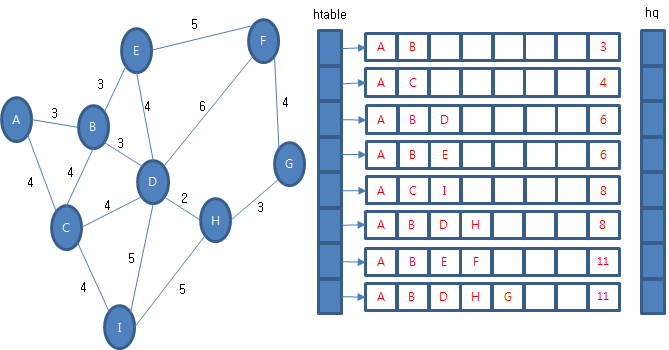
다음은 앞에서 구현한 다익스트라 알고리즘 코드입니다.
//Edge.h
#pragma once
#include <string>
using namespace std;
class Edge
{
string vt1;
string vt2;
int weight;
public:
Edge(string vt1,string vt2,int height);
bool Exist(string vt)const;
bool Exist(string vt1, string vt2)const;
string Other(string vt)const;
void View()const;
int GetWeight()const;
};
//Edge.cpp
#include "Edge.h"
#include <iostream>
using namespace std;
Edge::Edge(string vt1,string vt2,int weight)
{
this->vt1 = vt1;
this->vt2 = vt2;
this->weight = weight;
}
bool Edge::Exist(string vt)const
{
return (vt1 == vt)||(vt2==vt);
}
bool Edge::Exist(string vt1, string vt2)const
{
return Exist(vt1) && Exist(vt2);
}
string Edge::Other(string vt)const
{
if(vt1 == vt)
{
return vt2;
}
if(vt2 == vt)
{
return vt1;
}
return "";
}
void Edge::View()const
{
cout<<"("<<vt1<<","<<vt2<<","<<weight<<")";
}
int Edge::GetWeight()const
{
return weight;
}
//Graph.h
#pragma once
#include "Edge.h"
#include <iostream>
#include <vector>
using namespace std;
typedef vector<string> Vertexs;
typedef Vertexs::iterator VIter;
typedef Vertexs::const_iterator CVIter;
typedef vector<Edge *> Edges;
typedef Edges::iterator EIter;
typedef Edges::const_iterator CEIter;
class Graph
{
Vertexs vertexs;
Edges edges;
public:
~Graph(void);
bool AddVertex(string vt);
bool Exist(string vt)const;
bool AddEdge(string vt1, string vt2,int weight);//간선 추가
bool Exist(string vt1,string vt2)const;
void ViewNeighbors()const;
void ViewNeighbor(string vt)const;
Vertexs FindNeighbors(string vt)const;
Edges FindEdges(string vt)const;
};
//Graph.cpp
#include "Graph.h"
#include <string.h>
#include <algorithm>
Graph::~Graph(void)
{
EIter seek = edges.begin();
EIter last = edges.end();
for( ;seek != last; ++seek)
{
delete (*seek);//간선 소멸
}
}
bool Graph::AddVertex(string vt)
{
if(Exist(vt))
{
return false;
}
vertexs.push_back(vt);
return true;
}
bool Graph::Exist(string vt)const
{
return find(vertexs.begin(),vertexs.end(),vt) != vertexs.end();
}
bool Graph::AddEdge(string vt1, string vt2,int weight)//간선 추가
{
if(Exist(vt1)&&Exist(vt2))
{
if(Exist(vt1,vt2))
{
return false;
}
CEIter seek = edges.begin();
CEIter last = edges.end();
for( ;seek != last; ++seek)
{
if((*seek)->GetWeight()>=weight)
{
break;
}
}
edges.insert(seek,new Edge(vt1,vt2,weight));
return true;
}
return false;
}
bool Graph::Exist(string vt1,string vt2)const
{
CEIter seek = edges.begin();
CEIter last = edges.end();
for( ;seek != last; ++seek)
{
if((*seek)->Exist(vt1,vt2))
{
return true;
}
}
return false;
}
void Graph::ViewNeighbors()const
{
cout<<"=== 이웃 정점 ==="<<endl;
CVIter seek = vertexs.begin();
CVIter last = vertexs.end();
for( ;seek != last; ++seek)
{
cout<<(*seek)<<"의 이웃: ";
ViewNeighbor(*seek);//i정점의 이웃 보여주기
}
cout<<endl;
}
void Graph::ViewNeighbor(string vt)const
{
CEIter seek = edges.begin();
CEIter last = edges.end();
for( ;seek != last; ++seek)
{
if((*seek)->Exist(vt))
{
cout<<(*seek)->Other(vt)<<" ";
}
}
cout<<endl;
}
Vertexs Graph::FindNeighbors(string vt)const
{
Vertexs neighbors;
CEIter seek = edges.begin();
CEIter last = edges.end();
for( ;seek != last; ++seek)
{
if((*seek)->Exist(vt))
{
neighbors.push_back((*seek)->Other(vt));
}
}
return neighbors;
}
Edges Graph::FindEdges(string vt)const
{
Edges neighbors;
CEIter seek = edges.begin();
CEIter last = edges.end();
for( ;seek != last; ++seek)
{
if((*seek)->Exist(vt))
{
neighbors.push_back(*seek);
}
}
return neighbors;
}
//Heuristic.h
#pragma once
#include "Graph.h"
#include <vector>
using namespace std;
typedef vector<string> Foots;
typedef Foots::iterator FIter;
typedef Foots::const_iterator CFIter;
class Heuristic;
typedef vector<Heuristic *> Heues;
typedef Heues::iterator HIter;
typedef Heues::const_iterator CHIter;
class Heuristic
{
Graph *graph;
Foots foots;
int weight;
public:
Heuristic(Graph *graph, string start);
Heues EnumNext();
void View()const;
int GetWeight()const;
string GetLastVertex()const;
private:
Heuristic(const Heuristic *bheu,string vt,int weight);
};
//Heuristic.cpp
#include "Heuristic.h"
#include <algorithm>
Heuristic::Heuristic(Graph *graph,string start)
{
this->graph = graph;
foots.push_back(start);
weight = 0;
}
Heues Heuristic::EnumNext()
{
Heues nheues;
string last_foot = (*foots.rbegin());
Edges edges = graph->FindEdges(last_foot);
EIter eseek = edges.begin();
EIter elast = edges.end();
for( ;eseek != elast; ++eseek)
{
string other = (*eseek)->Other(last_foot);//간선의 나머지 정점 구하기
if(find(foots.begin(), foots.end(),other) == foots.end())//방문한 적이 없으면
{
Heuristic * nheu = new Heuristic(this,other,(*eseek)->GetWeight());
HIter hseek = nheues.begin();
HIter hlast = nheues.end();
for( ;hseek != hlast; ++hseek)
{
if((*hseek)->GetWeight()>=nheu->GetWeight())
{
break;
}
}
nheues.insert(hseek,nheu);//*seek를 추가 방문하는 새로운 경험을 생성
}
}
return nheues;
}
void Heuristic::View()const
{
cout<<"cost "<<weight<<" :";
CFIter seek = foots.begin();
CFIter last = foots.end();
for( ;seek != last; ++seek)
{
cout<<(*seek)<<" ";
}
cout<<endl;
}
int Heuristic::GetWeight()const
{
return weight;
}
string Heuristic::GetLastVertex()const
{
return (*foots.rbegin());
}
Heuristic::Heuristic(const Heuristic *bheu,string vt,int weight)
{
this->graph = bheu->graph;
foots = bheu->foots;
this->weight = bheu->weight + weight;//경로의 비용을 추가
foots.push_back(vt);//vt를 방문한 행적에 추가
}
//Program.cpp
#include "Heuristic.h"
#include <queue>
using namespace std;
struct HGreater
{
bool operator()(const Heuristic *h1, const Heuristic *h2) const
{
return h1->GetWeight()> h2->GetWeight();
}
};
int main()
{
Graph *graph = new Graph();//그래프 동적 생성
graph->AddVertex("A");
graph->AddVertex("B");
graph->AddVertex("C");
graph->AddVertex("D");
graph->AddVertex("E");
graph->AddVertex("F");
graph->AddVertex("G");
graph->AddVertex("H");
graph->AddVertex("I");
graph->AddEdge("A", "B", 3);//간선 추가
graph->AddEdge("A", "C", 4);//간선 추가
graph->AddEdge("B", "C", 4);//간선 추가
graph->AddEdge("B", "D", 3);//간선 추가
graph->AddEdge("B", "E", 3);//간선 추가
graph->AddEdge("C", "D", 3);//간선 추가
graph->AddEdge("C", "I", 4);//간선 추가
graph->AddEdge("D", "E", 4);//간선 추가
graph->AddEdge("D", "F", 6);//간선 추가
graph->AddEdge("D", "H", 2);//간선 추가
graph->AddEdge("D", "I", 5);//간선 추가
graph->AddEdge("E", "F", 5);//간선 추가
graph->AddEdge("F", "G", 4);//간선 추가
graph->AddEdge("G", "H", 3);//간선 추가
graph->AddEdge("H", "I", 5);//간선 추가
graph->ViewNeighbors();
priority_queue<Heuristic *,vector<Heuristic *>, HGreater > hq;
Heues htable;
Heues all;
Heuristic *heu = new Heuristic(graph,"A");//초기 경험 정보를 생성
hq.push(heu);//큐에 보관
while(hq.empty() == false) //반복(큐가 비어 있지 않다면)
{
heu = hq.top();//큐에서 경험 정보 꺼내옮
hq.pop();
all.push_back(heu);
cout<<"찾는중 ";
heu->View();
Heues nheues = heu->EnumNext();//큐에서 꺼내온 경험 정보에서 다음 경험 목록 조사
HIter seek = nheues.begin();
HIter last = nheues.end();
for( ;seek != last; ++seek)//반복(다음 경험 목록을 순차적으로 반복)
{
HIter hseek = htable.begin();
HIter hlast = htable.end();
string nvt = (*seek)->GetLastVertex();
bool check = true;
for( ;hseek != hlast; ++hseek)
{
string hvt = (*hseek)->GetLastVertex();
if(nvt == hvt)
{
if((*seek)->GetWeight()<(*hseek)->GetWeight())
{
check = false;
}
break;
}
}
if(hseek == hlast)
{
hq.push(*seek);//큐에 보관
htable.push_back(*seek);
}
else
{
if(check == false)
{
htable.erase(hseek);
htable.push_back(*seek);
hq.push(*seek);
}
}
}
}
HIter hseek = htable.begin();
HIter hlast = htable.end();
cout<<"A에서의 최단 경로"<<endl;
for( ;hseek != hlast; ++hseek)
{
(*hseek)->View();
}
HIter aseek = all.begin();
HIter alast = all.end();
for( ;aseek != alast; ++aseek)
{
delete (*aseek);
}
delete graph;
return 0;
}
다익스트라 알고리즘은 인접행렬로 표현하는 것은 다루지 않았습니다. 앞에서 다룬 문제들을 인접 행렬로 소개한 것도 있고 비교적 구현이 단순하지만 실제 정점의 개수가 많으면 메모리 효율과 성능이 떨어지는 문제점을 갖고 있습니다. 이러한 이유와 더불어 그리 어렵지 않게 인접 행렬로 구현한 코드는 찾을 수 있기에 과감히 생략하였습니다.
위 코드는 약간의 코드 변경으로 벨만 포드 알고리즘으로 변경이 가능합니다. 경로 값만 음수로 전달하면 그대로 적용할 수 있으니 한 번 확인해 보시기 바랍니다.